Robotic systems have been traditionally utilized in indoor environments such as warehouses and offices to assist humans with simple tasks. However, the future of robotics holds the potential for these systems to navigate unknown and unmapped environments where obstacles can hinder their sensors. Air-ground robots, capable of moving both on the ground and in the air, are being explored for tasks in complex outdoor settings like natural disaster relief, package delivery, and environmental monitoring.
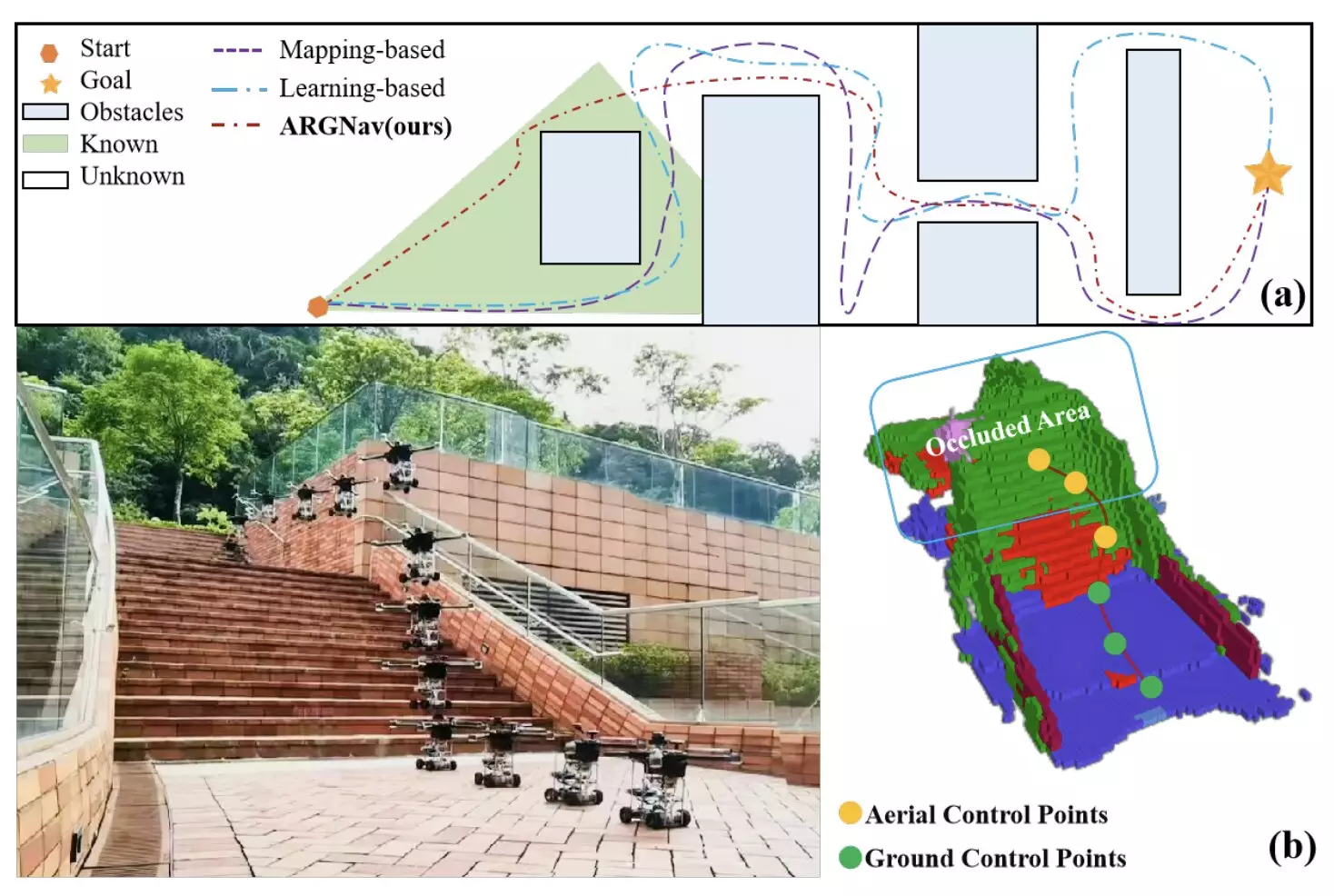
Researchers at the University of Hong Kong have introduced AGRNav, a cutting-edge framework aimed at enhancing the autonomous navigation of air-ground robots in environments prone to occlusion. This innovative framework comprises a lightweight semantic scene completion network (SCONet) and a hierarchical path planner. The SCONet component employs deep learning to predict obstacles and their features, while the path planner uses this information to plan energy-efficient paths for the robot to reach its destination.
Enhancing Navigation in Complex Environments
The primary goal of the research team was to improve the navigation of air-ground robots in environments where obstacles can easily obstruct their sensors. AGRNav addresses this challenge by providing accurate obstacle predictions and enabling the robot to navigate safely and efficiently. By combining the capabilities of aerial and ground movements, the framework offers a unique solution to the complexities of outdoor environments.
The effectiveness of AGRNav was demonstrated through simulations and real-world experiments where it outperformed existing navigation frameworks. The framework successfully identified optimal and energy-efficient paths for the robot, showcasing its potential for real-world deployment. Moreover, the open-source nature of AGRNav allows developers worldwide to access and contribute to its continuous improvement.
The development of AGRNav represents a significant advancement in the field of robotics, particularly in navigating unknown and complex environments. By combining advanced technologies like deep learning and hierarchical planning, this framework offers a promising solution to the challenges faced by air-ground robots. As robotics continue to evolve, frameworks like AGRNav will play a vital role in enhancing the capabilities and effectiveness of robotic systems in real-world scenarios.
Leave a Reply