Robotic grippers have come a long way in recent years, with advancements in design and functionality revolutionizing the field of robotics. Many grippers on the market today are inspired by human hands, offering a high level of dexterity and the ability to manipulate a variety of objects. However, these grippers often come with complex mechanisms and programming tools, making them less practical for large-scale deployment. Researchers at Purdue University and MIT have developed a simpler, yet equally effective robotic gripper that bridges the gap between high-degree-of-freedom grippers and simple parallel-jaw grippers.
The newly developed gripper by Yu She and his colleagues features 5 degrees of freedom, making it easier to control and program compared to traditional high-DOF robotic hands. This gripper consists of two fingers attached to a gripper base, with a vision-based tactile sensor mounted on one of the fingers. The gripper’s simple design allows for easier programming and control, while still enabling human-like in-hand manipulations through sensory data collected by the integrated sensor.
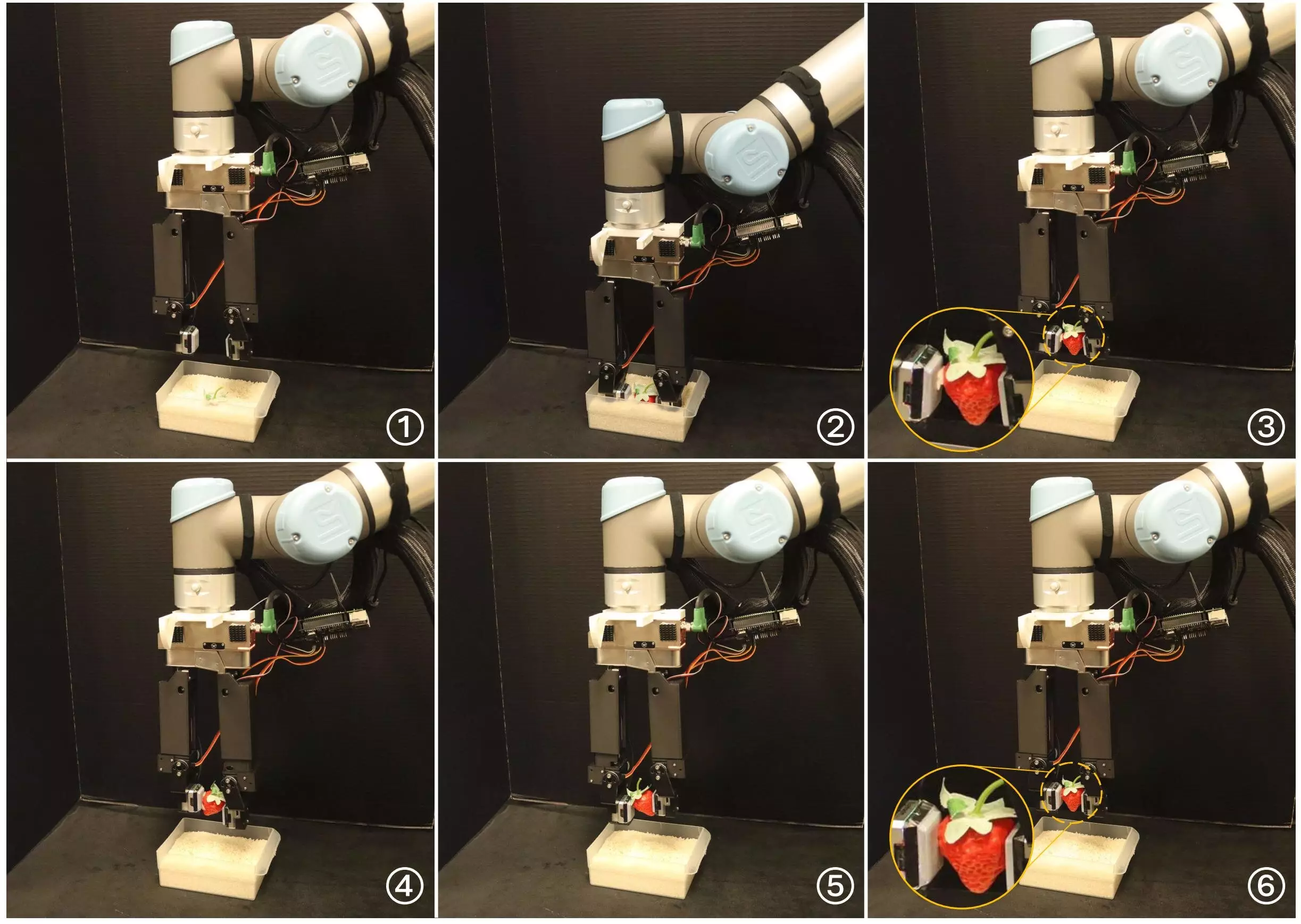
One of the key features of this gripper is its ability to combine its 5 DOF to achieve a high level of dexterity during in-hand manipulation tasks. In initial real-world experiments, the gripper was able to successfully complete intricate manipulation tasks such as singulation and scooping. This level of performance surpasses that of most simple grippers with fewer degrees of freedom, showcasing the potential of this new design in the field of robotics.
The implications of this research are significant, as the simplified design of this gripper paves the way for more cost-effective and energy-efficient robotic solutions. By reducing complexity in controller design, the gripper offers a more robust and easier-to-implement option for a wide range of robotic applications. The researchers behind this project plan to further develop the gripper to tackle even more challenging manipulation tasks, pushing the boundaries of what is possible in the field of robotic grippers.
Overall, the development of this simplified robotic gripper represents a significant advancement in the field of robotics. By combining ease of control with high dexterity, this gripper opens up new possibilities for the development of cost-effective and efficient robotic systems. The potential applications of this technology are vast, and the impact of this research is sure to be felt across the robotics industry in the years to come.
Leave a Reply