In the ever-evolving field of robotics, particularly soft robotics, the advent of Fabric-Based Soft Pneumatic Actuators (FSPAs) marks a transformative stride toward creating adaptable, safe, and efficient devices. These actuators, which operate by inflating and deflating, allow for movement and deformation, making them uniquely suitable for applications that necessitate interaction with humans or delicate objects. By leveraging their lightweight and flexible properties, FSPAs emerge as ideal options for a host of innovative applications, ranging from wearable technology to adaptive structures and assistive devices. Despite their promising potential, the engineering of these actuators presents significant challenges that researchers are actively seeking to overcome.
The major obstacles in developing effective FSPAs stem from the inherent need for precision in material behaviors and the design process itself. Traditional manufacturing methods rely heavily on trial and error to attain the desired levels of control and predictability in actuator performance. The current landscape of FSPAs often involves isotropic materials that yield uniform deformation under pressure, but their predictability ties designers to a cumbersome iterative process. This labor-intensive approach limits advancements in actuator capabilities and reduces the overall efficiency of the design process. To address these formidable challenges, researchers are reinventing the wheel, seeking to automate processes and enhance design methodologies.
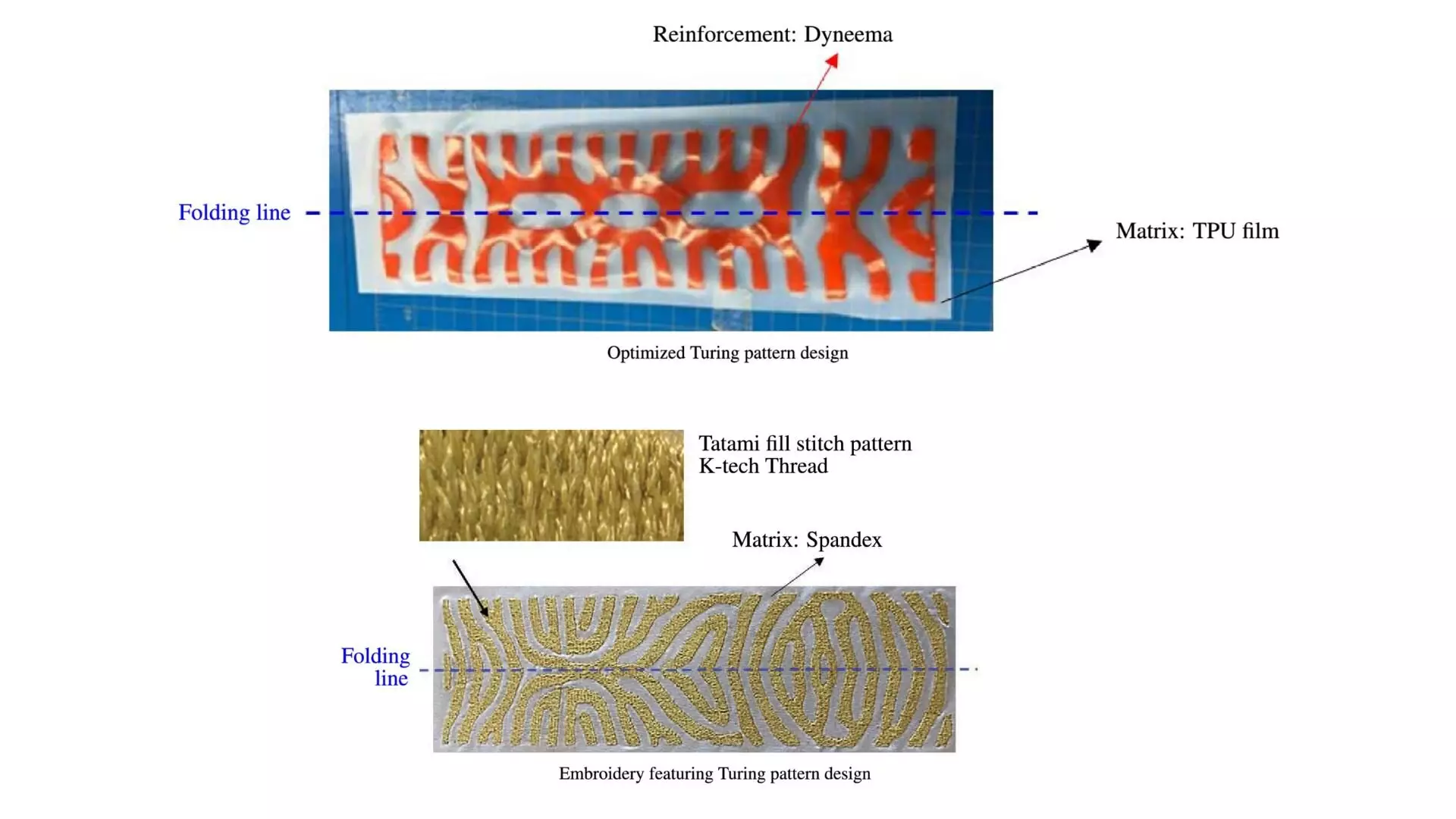
A significant breakthrough in overcoming these hurdles is presented in a recent study published in *Scientific Reports*, which proposes the incorporation of Turing patterns into the design of FSPAs. Turing patterns arise from complex interactions between substances through reaction-diffusion processes, generating stable, repeating configurations that can be harnessed to produce intricate surface textures in materials. Researchers, including Dr. Masato Tanaka and Dr. Tsuyoshi Nomura from Toyota Central R&D Labs, and Dr. Yuyang Song from Toyota Motor Engineering & Manufacturing North America, endeavor to apply Alan Turing’s influential theories of morphogenesis, which shed light on how patterns in nature develop, to revolutionize the way soft pneumatic actuators are designed and fabricated.
The research team’s methodology emphasizes a gradient-based orientation optimization technique applied to the design of FSPA membranes. They aim to exploit anisotropic materials—where properties vary based on orientation—to enable greater flexibility in actuator movements. The dual focus on automating the design process and fine-tuning material behavior represents an important pivot away from manual and often inefficient methods of creation. By utilizing mathematical models of anisotropic reaction-diffusion systems, the team seeks to determine the ideal orientations for material fibers, thereby facilitating controlled and repeatable performance outcomes.
Upon optimizing material orientations and deriving intricate Turing patterns, the practical step of fabricating these structures follows. The researchers are experimenting with innovative fabrication methods, including heat bonding and embroidery, to bring their designs to life. Heat bonding involves combining stiff fabrics with softer materials, while embroidery embeds patterns directly within the fabric structure, creating differentiated stiffness zones crucial for nuanced movements. Both methods promise to enhance scalability and cost-effectiveness, opening new avenues for widespread production of these advanced actuators.
In comparative analyses against conventional actuator designs, the researchers have noted that Turing pattern-based designs hold significant advantages. They demonstrate improved efficiency across diverse movements, including both bending and twisting actions. While challenges remain, such as achieving S-shaped bending, the research team claims that their methods can produce versatile motions with minimal pneumatic input. Looking ahead, the integration of cutting-edge materials—such as shape memory alloys or electroactive polymers—could usher in even more dynamic actuator designs.
Furthermore, transitioning fabrication techniques toward mass production methods, including 3D printing and automated weaving, could revolutionize the accessibility and functionality of soft pneumatic actuators in various fields.
The innovative application of Turing patterns in fabric-based pneumatic actuators signals a significant leap forward in soft robotics. By addressing long-standing challenges in actuator design and material behavior, researchers are not only improving existing technologies but also paving the way for future advancements. As the landscape of robotics increasingly prioritizes flexibility and safety, the methodology demonstrated by this research team holds great promise, indicating a path forward that could enhance our interactions with robotic systems in daily life and industrial applications alike. The interplay of creativity, mathematics, and engineering epitomizes the future of soft robotics, bridging gaps previously thought insurmountable.
Leave a Reply