Robots that can imitate human actions in real-time have the potential to greatly assist in everyday tasks without the need for extensive pre-programming. However, a major challenge in achieving this level of imitation is the lack of correspondence between a robot’s body and that of a human. This discrepancy can hinder the performance of imitation learning techniques and limit the capabilities of humanoid robotic systems.
Researchers at U2IS, ENSTA Paris have introduced a new deep learning-based model to address the issues of human-robot correspondence in motion imitation. The model is designed to improve online human-robot imitation by translating sequences of joint positions from human motions to motions achievable by a robot. By leveraging the generalization capabilities of deep learning, the researchers aim to enhance the imitation capabilities of humanoid robotic systems.
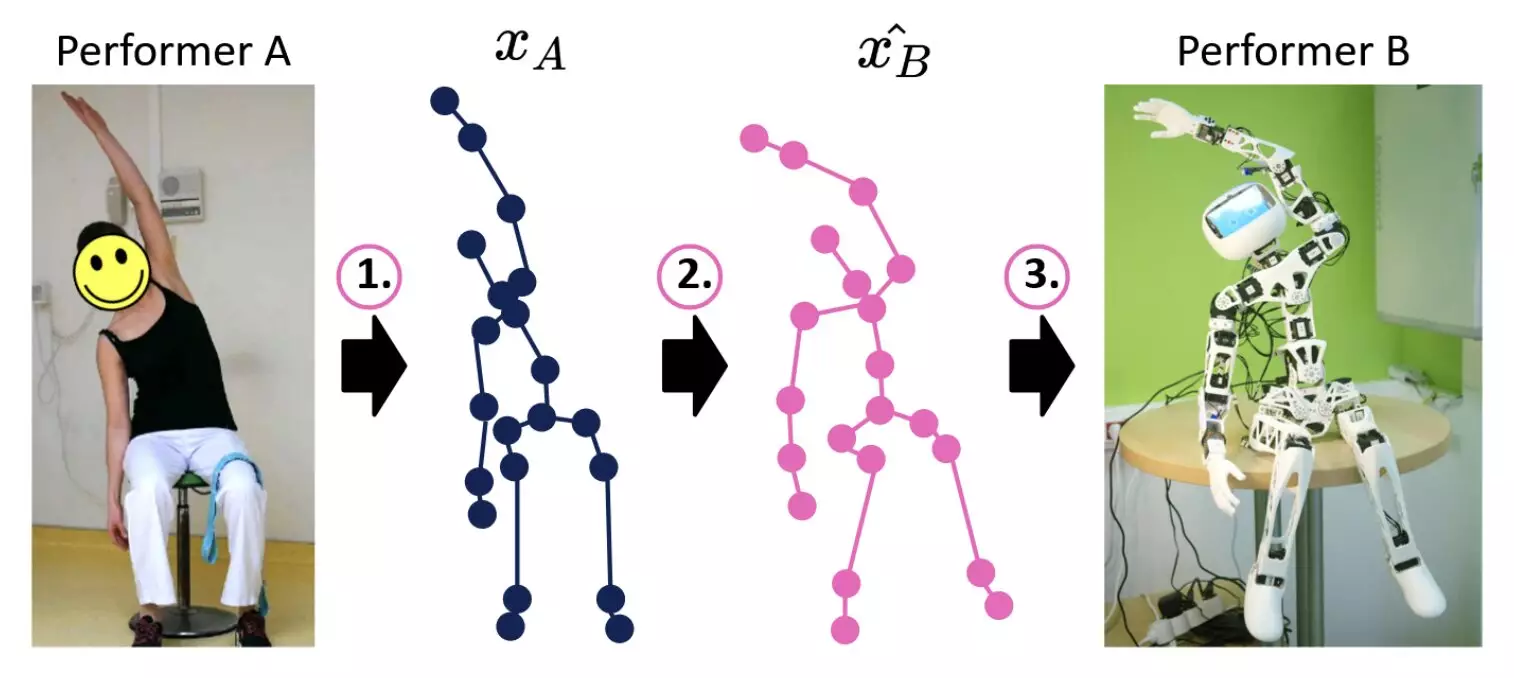
The model developed by the researchers breaks down the human-robot imitation process into three key steps: pose estimation, motion retargeting, and robot control. Firstly, pose estimation algorithms are used to predict skeleton-joint positions that represent human motions. These predicted positions are then translated into joint positions that can be realistically produced by the robot’s body. Finally, the translated sequences are employed to plan the robot’s movements, enabling it to perform tasks effectively.
While the researchers conducted preliminary tests to evaluate the performance of their model, the results did not meet their expectations. This suggests that current deep learning methods may face challenges in successfully retargeting motions in real-time. The researchers plan to further investigate potential issues with their approach and work towards improving the model’s performance. Future directions include creating a dataset of paired motion data for human-robot imitation and enhancing the model architecture to enhance retargeting predictions.
The use of deep learning methods for human-robot imitation shows promising potential but also presents challenges that need to be addressed. While the current model may not have achieved the desired results, ongoing research and improvements in model architecture could lead to more accurate retargeting predictions in the future. The researchers remain committed to advancing the field of human-robot imitation through innovative deep learning approaches.
Leave a Reply