Over the past decade, flexible sensors have made significant advancements in sensing capabilities. However, measuring complex deformations resulting from forces or strains from multiple axes remains a challenge due to the lack of independent perception of multi-axial stimuli. The main obstacle for independently perceiving biaxial stimuli lies in the Poisson’s effect of sensing materials.
Researchers have identified zero Poisson’s ratio (ZPR) materials as a potential solution to the interference issues in biaxial or multi-axial stimuli perception. These materials maintain a constant transverse width under longitudinal strain, offering a promising approach to address the challenges faced in measuring complex deformations. However, preparing zero Poisson’s ratio elastomer membranes poses a significant challenge due to the incompressible property and nearly 0.5 Poisson’s ratio of elastomers.
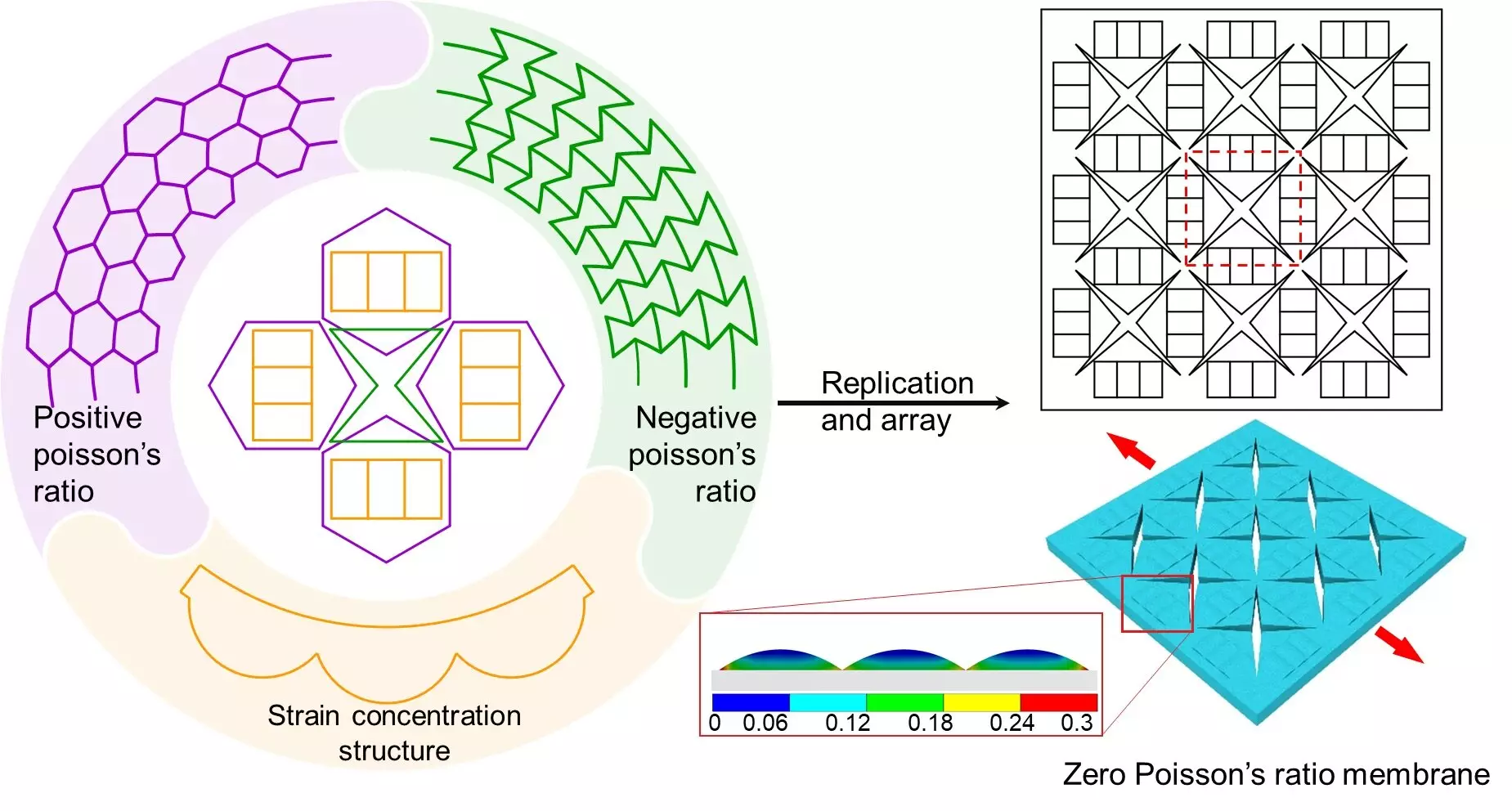
Led by Prof. Hao Wu and his student Dr. Xin Huang from Huazhong University of Science and Technology, the research team explored a novel approach to achieve zero Poisson’s ratio structure. They proposed combining traditional positive Poisson’s ratio (PPR) structure with negative Poisson’s ratio (NPR) structure as an effective method. By examining the superposition of the Poisson’s ratio of individual structures, the team discovered that the feature size and width of the hybrid structure could vary the Poisson’s ratio between positive and negative values.
Through finite element analysis, the researchers identified the optimal parameters to obtain the ZPR membrane with a Poisson’s ratio of 0.07. In contrast, the PDMS membrane without the hybrid structure exhibited a Poisson’s ratio of 0.43, highlighting the effectiveness of the hybrid structure in decreasing Poisson’s ratio. The resulting flexible sensors based on ZPR membranes demonstrated the ability to accurately detect uniaxial stimuli and independently detect biaxial stimuli. When subjected to uniaxial stretching, the sensors exhibited linear increases in electric resistance along the stretching direction while showing minimal changes perpendicular to the direction.
The ZPR flexible sensors offer a range of applications in robotic manipulation and locomotion with complex deformations. They can accurately measure contact forces between rigid manipulators and grasped objects, regardless of the deformation of the objects. By combining two perpendicular sensing units on manipulators’ fingers, these sensors can detect normal bending of fingers and unexpected collisions with obstacles. Moreover, ZPR flexible sensors enable the detection of locomotion distance and direction in biaxial soft robots, showcasing their potential in health care, human-machine interfaces, and robotic tactile sensing.
The innovative use of zero Poisson’s ratio materials has revolutionized the capabilities of flexible sensors, opening up new possibilities for applications in various fields. The research conducted by Prof. Wu and his team represents a significant advancement in the development of sensors with enhanced sensitivity and independence in detecting complex stimuli.
Leave a Reply