Imitation learning has shown great promise in teaching robots how to perform everyday tasks with reliability and precision. One common method used in imitation learning involves collecting detailed human demonstrations to enable robots to mimic specific movements. However, existing teleoperation systems struggle to effectively reproduce the complex and coordinated movements performed by humans, limiting the effectiveness of imitation learning frameworks.
Researchers at the University of California, San Diego recently introduced Bunny-VisionPro, a cutting-edge teleoperation system designed to enable the teleoperation of a robotic system for bimanual dexterous manipulation tasks. This innovative system aims to simplify the collection of human demonstrations for imitation learning, addressing the shortcomings of current teleoperation systems that lack focus on dual-hand control for complex tasks requiring hand coordination.
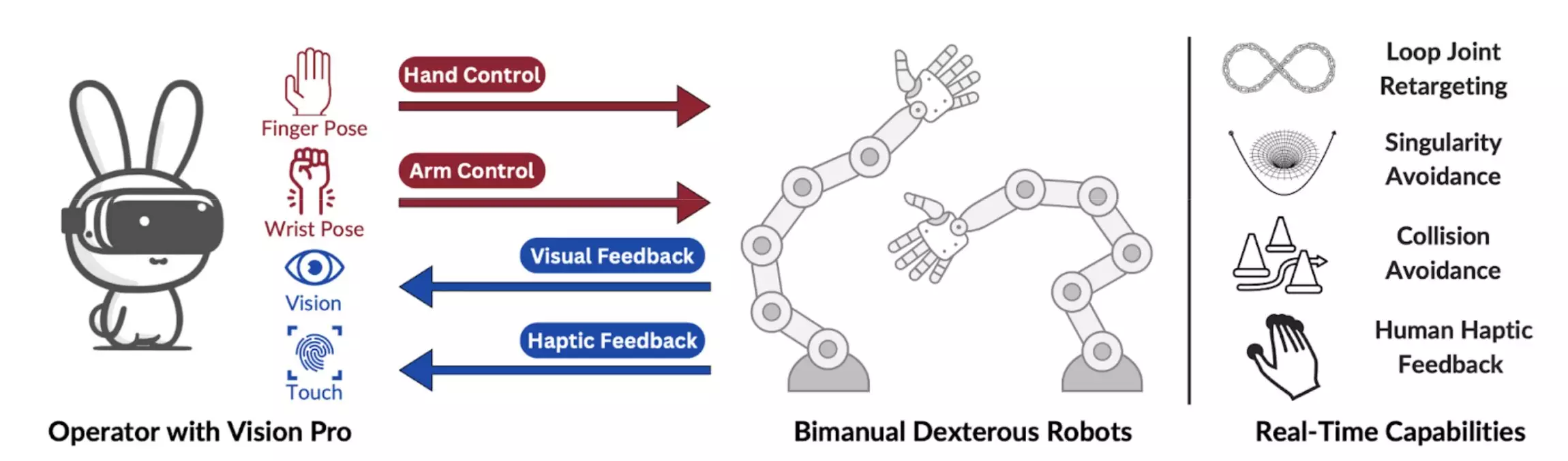
Bunny-VisionPro consists of three key components: an arm motion control module, a hand and motion retargeting module, and a haptic feedback module. The arm motion control module facilitates the mapping of human wrist poses to the robot’s end-effector poses, ensuring the safe control of the robotic manipulator in real-time while avoiding collisions. The hand and motion retargeting module enables the mapping of human hand poses to robot hand poses, including support for loop-joint structures. Additionally, the haptic feedback module enhances user experience by transferring robot tactile sensing to human haptic feedback through advanced algorithmic and hardware design.
One of the key advantages of Bunny-VisionPro is its ability to enable safe and real-time control of a bimanual robotic system. Unlike previous solutions, Bunny-VisionPro integrates haptics and visual feedback, making the collection of human demonstrations more immersive and improving the overall success rates of teleoperation systems. The system effectively balances safety and performance, allowing for minimal delay in control of robot arms and multi-fingered hands, while incorporating collision avoidance and singularity handling for reliable operation in real-world robotic applications.
The development of Bunny-VisionPro by Xiaolong Wang and his colleagues has the potential to simplify the use of teleoperation for collecting demonstrations in imitation learning frameworks. The system’s portability, lightweight design, and ease of installation make it a promising solution for robotics labs worldwide. Bunny-VisionPro could inspire the development of similar immersive robotic teleoperation systems in the future, enhancing manipulation capabilities through the utilization of robot tactile information for better precision and adaptability.
Bunny-VisionPro represents a significant advancement in the field of robotic teleoperation and imitation learning. With its innovative features and streamlined design, Bunny-VisionPro has the potential to revolutionize the way robots are trained to perform complex tasks through human demonstrations. As researchers continue to enhance the capabilities of teleoperation systems like Bunny-VisionPro, the future of robotics and automation looks brighter than ever.
Leave a Reply