The field of materials science and engineering has been making tremendous strides in recent years, especially in the realm of robotic and prosthetic applications. One of the most exciting developments is the introduction of dual-modal tactile e-skins, designed to enhance the sensing capabilities of robots while also enabling bidirectional touch-based human-robot interactions (HRIs). Researchers at Tsinghua University have been at the forefront of this innovation, introducing a new dual-modal tactile e-skin that promises to revolutionize the way humans and robots interact.
Dr. Wenbo Ding and his colleagues have been working tirelessly to address the limitations of current electronic skin technology, which typically only provides either tactile perception or tactile feedback, but not both. Their recent study aimed to develop a dual-modal electronic skin that could not only sense tactile information but also respond to contact forces, thus enabling bidirectional transmission of tactile information.
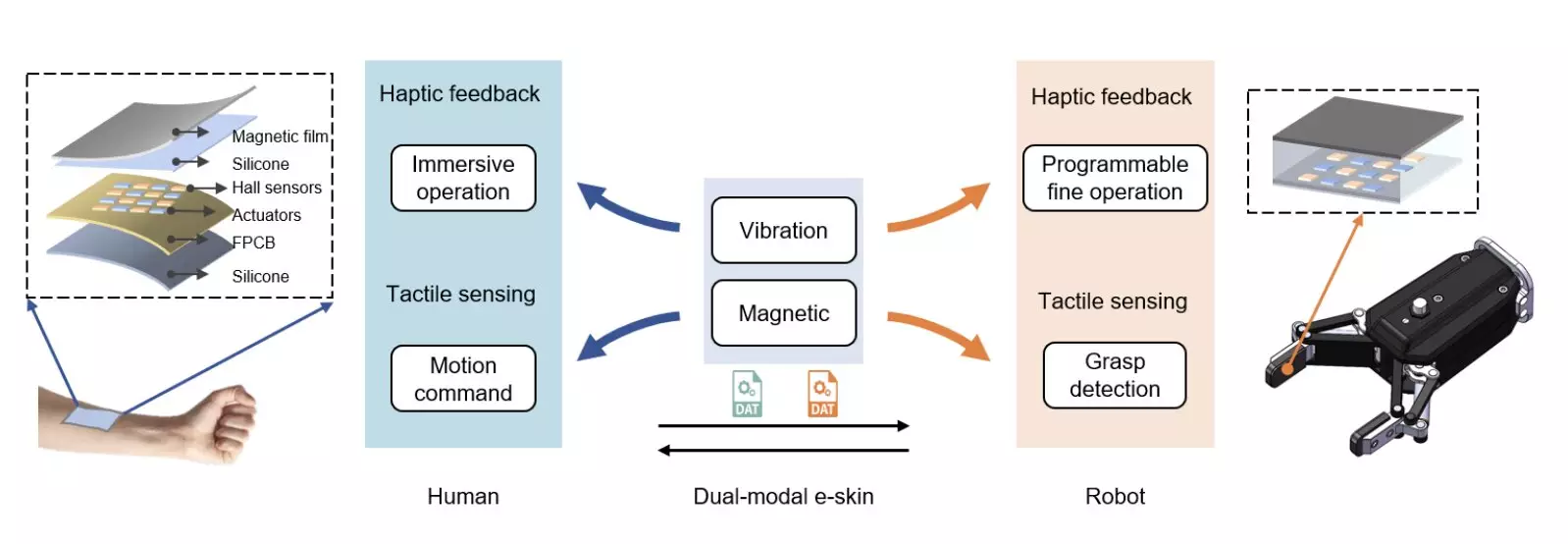
The dual-modal tactile e-skin integrates a flexible magnetic film, silicon elastomer, Hall sensor array, actuator array, and microcontroller unit. The Hall sensor in the e-skin detects the deformation of the magnetic film caused by mechanical pressure, leading to changes in the magnetic field and achieving multi-dimensional tactile perception. Simultaneously, the actuator array generates mechanical vibration to provide tactile feedback, creating a seamless interactive experience between humans and robots.
Dr. Ding and his team conducted a series of experiments to test the effectiveness of their dual-modal tactile e-skin. They explored its potential for object recognition, precise weighing, and immersive HRI. The results were promising, with the e-skin proving effective in both sensing tactile information and providing tactile feedback. The innovative weighing experiment, in particular, demonstrated the e-skin’s versatility and precision.
The implications of the dual-modal tactile e-skin are vast and exciting. It could revolutionize robotic manipulation, enable more precise control in industrial robots, and pave the way for the development of sophisticated prosthetic limbs. Dr. Ding emphasized that future research will focus on miniaturizing e-skin components for broader applications, incorporating new sensing modalities like temperature sensing, and adding auditory feedback to enhance the overall human-robot interaction experience.
The introduction of dual-modal tactile e-skins represents a significant advancement in the field of robotics and prosthetics. With the potential to revolutionize human-robot interactions and enhance sensory capabilities, this technology opens up a world of possibilities for the future of robotics. Dr. Ding and his team’s groundbreaking work at Tsinghua University is paving the way for a new era of innovation and collaboration between humans and robots.
Leave a Reply